FANUC工业机器人码垛编程详解!
码垛 B:包含码垛B(单途径形式)和码垛BX(多途径形式) 适用于工件姿态稳定,堆叠时的底面形状为直线或四角形。 码垛 E:包含码垛E(单途径形式)和码垛EX(多途径形式)适用于杂乱的堆叠形式(工件姿态改动,堆叠时的底面形状不是四角形)。
(1)码垛指令格局:码垛指令依据码垛寄存器的值,依据堆叠形式核算当时 的堆叠点方位,并依据途径形式核算当时的途径,改写码垛动作指令的方位 数据。

(2)码垛动作指令:以使用具有趋近点、堆叠点、回退点的途径点作为方位 数据的动作指令,是码垛专用的动作指令。该方位数据经过码垛指令每次都 被改写。
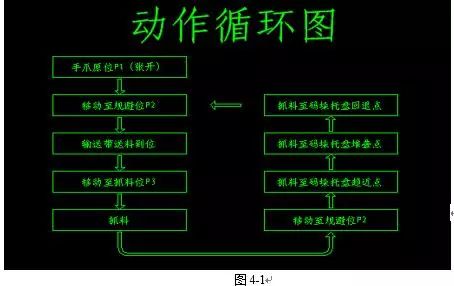
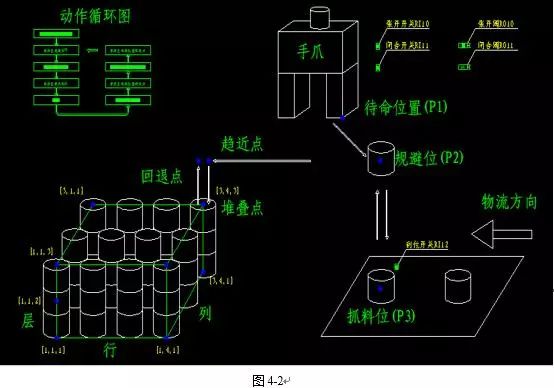
如图 4-1、4-2 所示动作循环,在输送带 P3 出进行工件抓取,在托盘上进行 码垛。
(3) 码垛功用,在三个指令也即码垛指令、码垛动作指令、码垛完毕指令 存在于一个程序而发挥作用。即便只将一个指令复制到子程序中进行 示教,该功用也不会正常作业,应与留意。
(4) 码垛编号,在示教完码垛的数据后,伴随码垛指令、码垛动作指令、 码垛完毕指令一同被主动写入。不需要介意是否在其他程序中重复使 用着码垛编号(每个程序都具有该码垛编号的数据)。
文章出处:【微信号:GKB1508,微信大众号:工控帮】欢迎增加重视!文章转载请注明出处。
有以下特色:将数字控制机床的伺服轴与遥控操纵器的连杆机构联接在一同,预先设定的机械手动作经
【国产FPGA+OMAPL138开发板体会】(原创)5.FPGA的AI加快源代码
【米尔-全志T113-i开发板试用】JPG硬件编码的完成、YUV转化neon加快和比照测验
【先楫HPM5361EVK开发板试用体会】(原创)6.手把手实战红外线传感器源代码
-
11-07
工业机器人的雕琢艺术检测你编程的才能的时分到了!
雕琢机器人作为可以在必定程度上完结雕琢全自动化的产品,在雕琢速度、精准程度、精密程度等方面均有更...
-
11-08
欧克雕刻机使用方法-欧克雕刻机使用方法
雕刻机怎么使用数字化雕刻机是一种能够将设计图自动来加工的数控设备,其应用于房地产行业中,可以大幅...
-
11-09
三四分钟“所画即可呈” 这款云激光雕琢机有点牛
齐鲁网·闪电新闻5月23日讯2021年5月23日下午,金威刻激光以“光穿万物智在随心”为主题的慈...
-
11-09
微雕著作多图赏识
微雕,望文生义便是细小,微型的雕琢。微雕的前史源源不绝,就拿我国的微雕来说,最早可以追溯到商周时...